「ロボメカ・デザインコンペ2010」優秀賞を受賞作品
平林宗二郎
工業設計学科 ※制作時所属
受賞作品
- 制作時学年
- 学部4年
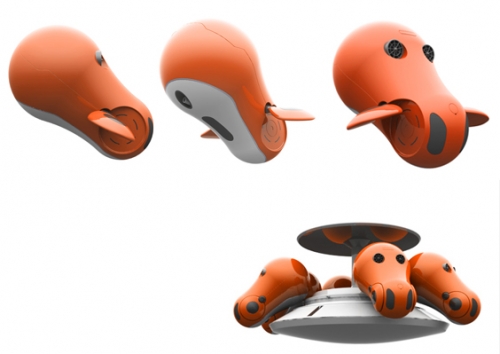
「ロボメカ・デザインコンペ2010」優秀賞を受賞作品。
閉鎖性水域における水質汚染をマイクロバブルによって解決する水中移動型ロボットのデザインです。
私たちの身の回りに多く存在する湖、池、貯水ダム、内湾といった閉鎖性水域の多くは植物プランクトンの異常発生により水質が汚染されています。それらは生態系の崩壊や悪臭、水景としての機能破綻などの問題を抱えているにもかかわらず、現在の水質改善方法の大半は、水景や生態系に配慮せずに大型装置を水域内に 設置して一時的な問題解決を図るものばかりです。そこで私は、上記3つの問題をすべて解決する水中ロボットを提案しました。水中ロボットを専門とする他大学の教授達にヒアリング調査を行い工学的根拠の基盤を固め、それと同時に合理的なデザインを目指しました。たとえば、マイクロバブルのための空気充填や本体の充電は 小型のチャージステーションを設置することで解決を図りましたが、この技術は今年の10月から海洋研究開発機構が開始したプロジェクトの一つの課題(水中でのドッキング)であり、非常に実現性の高いものです。これ以外にもいくつかの新しい提案が盛り込まれていますが、そのどれもが技術的に実現可能生が高いと考えられ ます。おそらく10年後くらいには諫早湾辺りを泳いでると思います。
- シェアする
-

